




Przed pierwszym uruchomieniem urządzenia, prosimy o uważne przeczytanie niniejszej instrukcji obsługi.
UWAGA!!!
Każda maszyna jest potencjalnie niebezpieczna. Obrabiarki sterowane numerycznie mogą stwarzać większe zagrożenie od manualnych. Poruszające się elementy systemu narażają operatora na niebezpieczeństwo. Unikaj z nimi kontaktu oraz zachowaj bezpieczny odstęp kiedy podane jest napięcie zasilania. To użytkownik odpowiedzialny jest za finalną aplikację. Powinien On zadbać o to, aby maszyna była zrealizowana zgodnie z obowiązującymi normami.
Moduły przeznaczone do zabudowy mogą być stosowane i obsługiwane tylko wtedy, gdy zostaną umieszczone w odpowiedniej osłonie. W miejscach, w których wystąpienie błędu w systemie automatyki może być przyczyną okaleczenia osób, uszkodzenia urządzeń lub spowodowania wysokich strat finansowych muszą być zastosowane dodatkowe środki ostrożności. Zagwarantują one bezpieczne działanie obrabiarki w przypadku wystąpienia uszkodzenia lub zakłócenia (np. niezależne wyłączniki krańcowe, blokady mechaniczne itd.). Producent oraz dystrybutorzy nie ponoszą odpowiedzialności za straty finansowe oraz doznane obrażenia wynikające z niewłaściwego i niezgodnego z przeznaczeniem eksploatowaniem urządzenia.
| Parametry elektryczne | |
|---|---|
| Napięcie zasilania | 230 V AC, 50 Hz |
| Napięcie zasilania silników | 45 VDC |
| Napięcie zasilania części logicznej (płyta główna SSK-MB2) | 12 VDC |
| Bezpiecznik główny (moduł bezpiecznikowy FM-02, bezpiecznik F1) | 3,15 A (topikowy) |
| Zabezpieczenie przepięciowe-jest (moduł bezpiecznikowy FM-02, R1, R2) | warystory |
| Sygnalizacja obecności zasilania głównego- jest (szafa sterownicza, drzwiczki) | Dioda LED |
| Bezpiecznik dodatkowy (np. zasilanie małego wrzeciona, moduł bezpiecznikowy FM-02, bezpiecznik F2 | 5 A (topikowy) |
| Bezpiecznik zasilacza (moduł softstart, bezpiecznik B1) | 3,15 A (topikowy) |
| Bezpiecznik zasilania części logicznej (moduł zasilacza MZ-01, bezpiecznik F1) | 0,5 A (topikowy) |
| Bezpieczniki osi (moduł bezpiecznikowy FM-01, oś X bezpiecznik F1, oś Y bezpiecznik F2, oś Z bezpiecznik F3, opcjonalnie oś A bezpiecznik F4 | 5 A (topikowy) |
| Sygnalizacja zasilania poszczególnych osi- jest (moduł bezpiecznikowy FM-01, oś X LED1, oś Y LED2, oś Z LED3, oś A LED4) | Diody LED |
| Maksymalny prąd na fazę pojedynczego silnika | 4,2 A |
| Poziomy napięć logicznych | L=0V H=5V |
| Maksymalna częstotliwość impulsów na wejściu CLK | 300 kHz |
| Maksymalny podział kroku | 128 |
| Parametry mechaniczne | |
|---|---|
| Wymiary | 432x432x182 (dł x szer x wys) [mm] (gabaryty szafy sterowniczej) 460x445x205 (dł x szer x wys ) [mm] (wymiar całkowity) |
| Waga | 15 kg (zależna od ilości sterowników SSK-B03 i użytego transformatora) |
| Parametry eksploatacyjne | |
|---|---|
| Temperatura pracy | +5ºC...+40ºC |
| Temperatura składowania | -10ºC...+40ºC |
| Wilgotność względna | 30%...75% (bez kondensacji) |
| Wibracje w czasie pracy | niedopuszczalne |
| Udary w czasie pracy | niedopuszczalne |
| Nasłonecznienie bezpośrednie | niedopuszczalne |
Budowa uniwersalnego sterownika numerycznego USN-3D4A
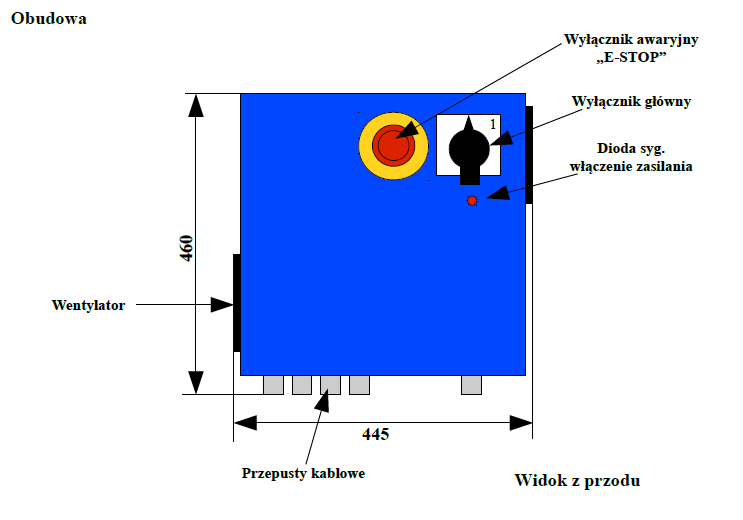
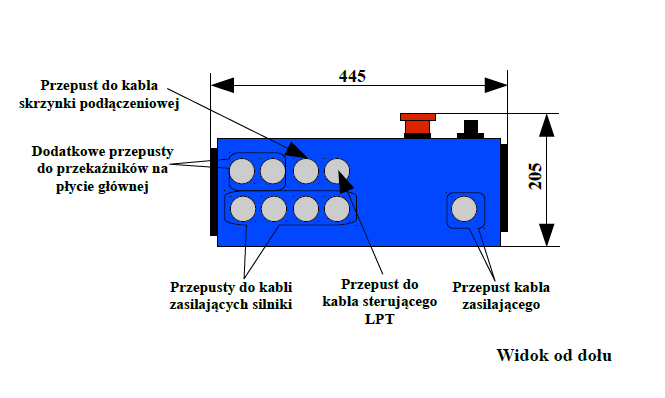
Rozmieszczenie elementów w obudowie
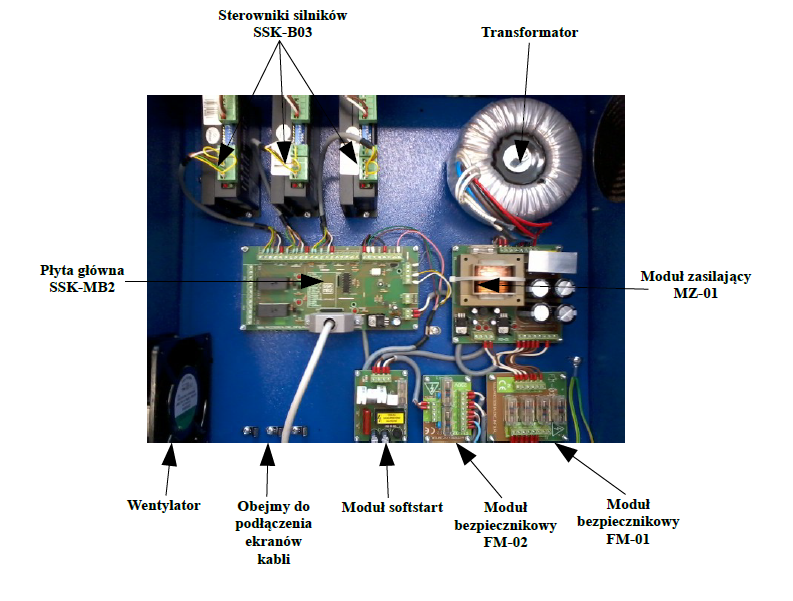
Standardowe rozmieszczenie elementów w obudowie widoczne jest na fotografii powyżej. Producent zastrzega sobie możliwość zmiany lokalizacji poszczególnych części systemu na potrzeby indywidualnej aplikacji realizowanej pod klienta.
Eksploatacja sterownika
W urządzeniu USN-3D4A jako stopnie końcowe mocy wykorzystano sterowniki SSK-B03. SSK-B03 jest ekonomicznym, wysokowydajnym sterownikiem mikrokrokowym bazującym na najnowszych osiągnięciach technicznych. Jest dostosowany do sterowania 2-fazowymi i 4- fazowymi hybrydowymi silnikami krokowymi. Używając zaawansowanej techniki bipolarnej stałoprądowej, pozwala uzyskać większą prędkość i moc z tego samego silnika porównując z tradycyjnymi technikami jakich używają np. sterowniki L/R. Jego 3-stanowa technika sterowania pozwala na poprawne kontrolowanie prądu cewki przy zachowaniu małych tętnień, co z kolei skutkuje zmniejszeniem się grzania silników.
Sterownik SSK-B03 może sterować krokowymi silnikami hybrydowymi z 4, 6 lub 8 wyprowadzeniami. Poniższy diagram pokazuje podłączenia do silników w różnej konfiguracji.
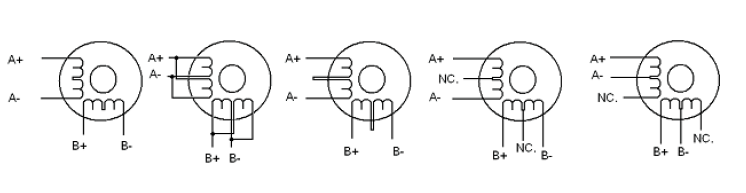
Silniki 4-przewodowe są najmniej elastyczne, ale najprostsze w podłączeniu. Prędkość i moment będą zależały od induktancji zwojów. Przy ustawianiu prądu wyjściowego sterownika należy pomnożyć prąd fazowy przez 1.4 aby wyznaczyć szczytowy prąd wyjściowy.
Silniki 6-przewodowe możemy podłączyć w dwóch konfiguracjach: wysoka prędkość niższy moment lub wysoki moment-niższa prędkość. Konfiguracja wyższej prędkości lub pół cewki jest tak nazwana ponieważ używa połowę zwojów silnika. Pozwala to na zmniejszenie indukcyjności przez co obniża się moment silnika. Będzie on bardziej stabilny przy wyższych prędkościach. Przy ustawianiu prądu wyjściowego sterownika należy pomnożyć prąd fazowy (lub unipolarny) przez 1.4 aby wyznaczyć szczytowy prąd wyjściowy. Konfiguracja wyższego momentu lub pełnej cewki używa całej induktancji zwojów faz. Aplikacja ta powinna być używana tam gdzie wymagany jest wyższy moment przy niskich prędkościach. Przy ustawianiu prądu wyjściowego należy pomnożyć prąd fazowy (lub unipolarny) przez 0.7 i taką wartość szczytową ustawić na sterowniku.
Silniki 8-przewodowe oferują wysoką elastyczność projektantowi systemu, ponieważ mogą być połączone szeregowo lub równolegle, pozwalając na zastosowanie w wielu aplikacjach. Połączenie szeregowe jest zazwyczaj stosowane tam, gdzie wymagany jest wysoki moment i niska prędkość. Ponieważ przy tej konfiguracji indukcyjność jest najwyższa, wydajność spada przy większych prędkościach. Do określenia szczytowego prądu wyjściowego należy pomnożyć wartość prądu fazowego (lub unipolarnego) przez 0,7. Równoległe połączenie uzwojeń silnika oferuje bardziej stabilny moment przy wyższych prędkościach. Do określenia szczytowego prądu wyjściowego należy pomnożyć wartość prądu fazowego (lub unipolarnego) przez 1.96 lub prąd bipolarny przez 1.4.
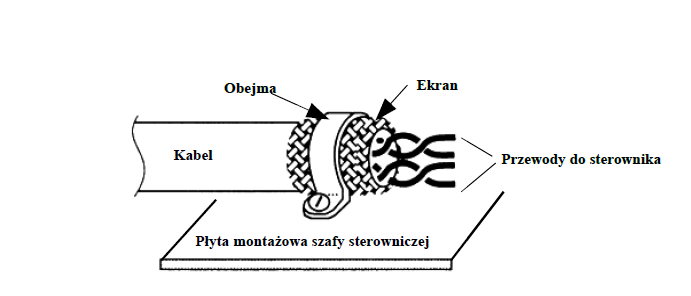
Po wybraniu konfiguracji z jaką ma pracować silnik zbędne (niepodłączone) przewody należy solidnie odizolować od pozostałych. Możemy teraz przystąpić do podłączenia kabli do stopni mocy uniwersalnego sterownika numerycznego USN-3D4A. Przy tej operacji należy wykazać się szczególną starannością. Złe kontakty mogą skutkować niepoprawną pracą silników, zakłóceniami lub w gorszym przypadku wystąpieniem zwarcia. W celu zmniejszenia zakłóceń motory z szafą należy łączyć kablami ekranowanymi i odpowiednio je uziemić za pomocą przygotowanych do tego celu obejm ze stali nierdzewnej.
Po podłączeniu silnika i przed uruchomieniem całego systemu należy poprawnie skonfigurować stopnie końcowe. Wybór wartości prądu podawanego na motory i podział kroku odbywa się za pomocą 8 mikrowłączników umieszczonych na obudowie modułu. Pierwsze trzy bity (Sw1, 2 i 3) przełącznika DIP używane są do ustawienia prądu pracy silnika (prąd dynamiczny). Należy wybrać ustawienia najbardziej zbliżone do prądu wymaganego przez silnik według tabeli podanej poniżej:
| Prąd szczytowy | RMS | SW1 | SW2 | SW3 |
|---|---|---|---|---|
| 1,00A | 0,71A | ON | ON | ON |
| 1,46A | 1,04A | OFF | ON | ON |
| 1,91A | 1,36A | ON | OFF | ON |
| 2,37A | 1,69A | OFF | OFF | ON |
| 2,84A | 2,03A | ON | ON | OFF |
| 3,31A | 2,36A | OFF | ON | OFF |
| 3,76A | 2,69A | ON | OFF | OFF |
| 4,20A | 3,00A | OFF | OFF | OFF |
Przełącznik SW4 wykorzystywany jest do ustawiania prądu trzymającego. OFF oznacza, prąd trzymania zostanie ograniczony o połowę wybranej wartości prądu dynamicznego. ON oznacza, że prąd trzymania będzie taki sam jak wybrana wartość prądu dynamicznego. Sterownik, po upływie 1 sekundy od ostatniego sygnału kroku, automatycznie obniża do 60 % wybranej wartości prądu dynamicznego. W ten sposób zmniejsza się do 36% nagrzewanie silnika. Podział kroku ustawiany jest za pomocą przełączników SW 5, 6, 7 i 8 według poniższej tabeli:
| μkrok | μkroków/obrót ( dla silnika 1,8º) |
SW5 | SW6 | SW7 | SW8 |
|---|---|---|---|---|---|
| 2 | 400 | OFF | ON | ON | ON |
| 4 | 800 | ON | OFF | ON | ON |
| 8 | 1600 | OFF | OFF | ON | ON |
| 16 | 3200 | ON | ON | OFF | ON |
| 32 | 6400 | OFF | ON | OFF | ON |
| 64 | 12800 | ON | OFF | OFF | ON |
| 128 | 25600 | OFF | OFF | OFF | ON |
| 5 | 1000 | ON | ON | ON | OFF |
| 10 | 2000 | OFF | ON | ON | OFF |
| 20 | 4000 | ON | OFF | ON | OFF |
| 25 | 5000 | OFF | OFF | ON | OFF |
| 40 | 8000 | ON | ON | OFF | OFF |
| 50 | 10000 | OFF | ON | OFF | OFF |
| 100 | 20000 | ON | OFF | OFF | OFF |
| 125 | 25000 | OFF | OFF | OFF | OFF |
Standardowo podział mikrokroku ustawiany jest na 1/8. Jeżeli sterownik był zakupiony razem z silnikami, wówczas prąd sterownika został ustawiony na odpowiedni dla danego silnika. W przeciwnym przypadku został ustawiony prąd 4,2A. Należy wówczas dokonać nastawy odpowiedniej wartości dla posiadanych silników.
Pracę stopni mocy sygnalizują dwie diody LED umieszczone przy złączu sygnałów sterujących (zielona-poprawna praca, czerwona-błąd). Po podaniu napięcia zasilania i sygnału zezwolenia Enable dioda zielona świeci się ciągle. Po zmianie stanu ENA na przeciwny- dioda gaśnie.
Pracą silników steruje płyta główna SSK-MB2, która to rozdziela sygnały z portu LPT na poszczególne osie. Umożliwia ona również podłączenie krańcówek bazujących, limitowych czy też przycisku awaryjnego zatrzymania. Na module znajdują się dwa przekaźniki, posiadające po dwie oddzielne sekcje, których każda może przełączać prąd do 8A i napięcia do 250V. Wykorzystując wspomniane wyżej przekaźniki możemy realizować funkcje wł/wył elektrowrzeciono, podaj chłodziwo. Zastosowanie może być dowolne.
Do aplikacji z regulacją prędkości wrzeciona możemy rozbudować system o produkowany przez naszą firmę moduł Spindle Control. Zapewnia on konwersję częstotliwości wysyłanej z programu sterującego na analogowe napięcie 0....10V. Takim potencjałem możemy regulować niektóre falowniki.
W gotowym zestawie USN-3D4A podłączenia płyty, które pozostały do wykonania przez użytkownika, ograniczono do minimum (ewentualne podłączenie przekaźników). Instalację przewodów krańcówek przeniesiono do skrzynki podłączeniowej przez zastosowanie której, eliminujemy ilość kabli prowadzonych do szafy. Układ umożliwia sprawne połączenia grupowe z zachowaniem kompatybilności elektromagnetycznej. Moduł produkowany jest w dwóch wersjach standard i rozszerzona. W obu użycie szczelnej obudowy i dobrej jakości kanałów zapewnia znakomitą ochronę zarówno przed kurzem jak i wilgocią. Do instalacji przewodów w wewnątrz skrzynki wykorzystane zostały złącza mocowane na szynę DIN. Zastosowanie skrzynki zmniejsza koszty okablowania obrabiarki, ułatwia podłączenia, a co najważniejsze zwiększa estetykę całego systemu.
Wybrane parametry skrzynek podłączeniowych
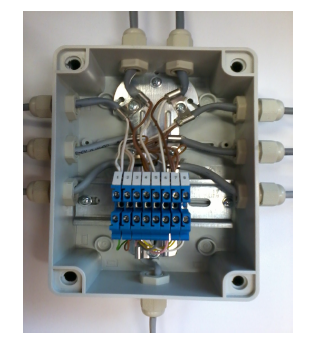
Przy zakupie uniwersalnego sterownika numerycznego klient otrzymuje gotowe urządzenie przygotowane do podłączenia elementów zewnętrznych (wyłączników krańcowych, czujnika itp.). Montaż najlepiej rozpocząć od instalacji omawianego modułu do korpusu maszyny. Następnym krokiem jest poprowadzenie kabli przez dławiki, odpowiednie ich ułożenie i zarobienie (najlepiej zakończyć je końcówkami rurkowymi, co ułatwi montaż i późniejszy serwis). Fotografia poniżej obrazuje przykładową realizację połączeń w wewnątrz skrzynki. Można także zaobserwować poprawny montaż ekranów kabli pozwalający na spełnienie norm kompatybilności elektromagnetycznej (przykład przy instalacji silników). Opis wyprowadzeń i połączeń wykonanych przez producenta.
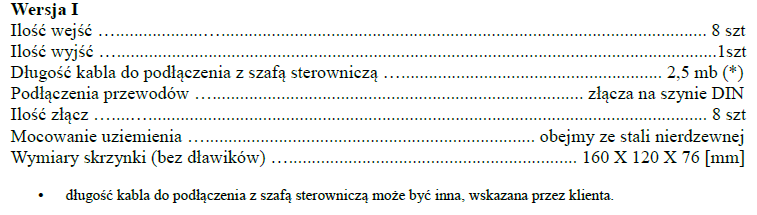
Wersja I
| Nr na listwie zaciskowej | Kolor przewodu | Funkcja | Podłączenie na płycie głównej |
|---|---|---|---|
| 1 | Zielony | Home | HOME X (pin 11) |
| 2 | Brązowy | Limit | HOME Y (pin 12) |
| 3 | Żółty | +12V | |
| 4 | Mostek z białym | GND | |
| 5 | Szary | E-stop | EMGR złącze J13 (pin 10) |
| 6 | Różowy | Czujnik | HOME Z (pin 13) |
| 7 | Żółty | +12V | +12V złącze J14 |
| 8 | Biały | GND | GND złącze J14 |
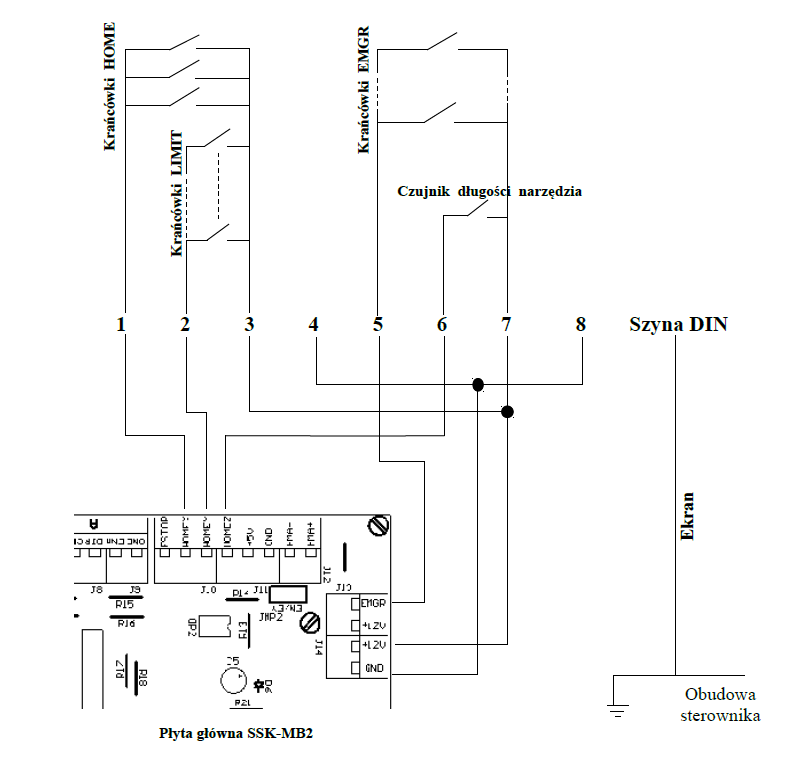
Schemat poniżej przedstawia najpopularniejszy sposób podłączenia elementów peryferyjnych. Należy zwrócić uwagę na to, iż wszystkie krańcówki są w stanie normalnie otwartym NO. W takiej konfiguracji wszystkie połączone są równolegle. Jeżeli w stosujemy włączniki typu NC należy pamiętać o zmianie ustawień w programie Mach, Activ Low na przeciwny. W takim układzie krańcówki łączymy szeregowo.
Jeżeli stosowane będą czujniki zbliżeniowe- indukcyjne wykorzystywana będzie również masa GND doprowadzona do złącz 4,8.
Schemat podłączeń
Opis wyprowadzeń proponowany przez producenta w skrzynce podłączeniowej.
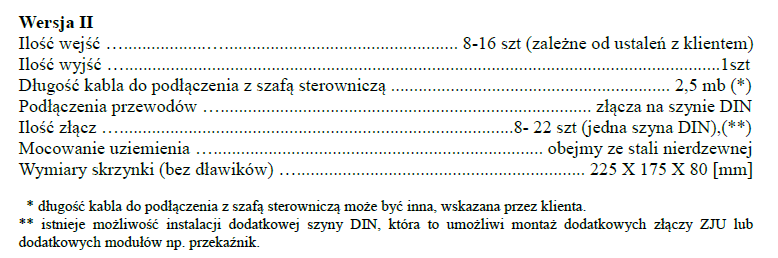
Wersja II
| Nr na listwie zaciskowej | Kolor przewodu | Funkcja |
|---|---|---|
| 1 | Biały | Home X |
| 2 | Brązowy | Home Y/do wykorzystania |
| 3 | Biały-żólty | Home Z/do wykorzystania |
| 4 | Mostek z +12V po bezpieczniku | +12V |
| 5 | Mostek z czarnym | GND |
| 6 | Różowy | Limit |
| 7 | Niebieski | Limit/Spindle |
| 8 | Mostek z +12V po bezpieczniku | +12V |
| 9 | Mostek z czarnym | GND |
| 10 | Zielony | E-stop |
| 11 | Żółto-brązowy | E-stop |
| 12 | Szaro-różowy | Czujnik |
| 13 | +12V po bezpieczniku | +12V |
| 14 | Czarny/ekran | GND |
| 15 | Biało-zielony | Przekaźnik1 COM |
| 16 | Czerwono-szary | Przekaźnik1 NO |
| 17 | Brązowo-zielony | Przekaźnik2 COM |
| 18 | Czerwony | Przekaźnik2 NO |
| 19 | Fioletowy | Do wykorzystania |
| 20 | Szary | Do wykorzystania |
Cały zastaw, zarówno część logiczna jak i stopnie mocy, zasilany jest z modułu MZ-01. Oparty jest on na podstawowej aplikacji zasilacza niestabilizowanego (transformator zewnętrzny w obudowie szafy sterowniczej, mostek i filtr realizowany za pomocą kondensatorów elektrolitycznych). Drugi jego blok jest oddzielnym zasilaczem z dodatkowym transformatorem, mostkiem, filtrem i scalonymi stabilizatorami 12V i 5V. Tą część chroni dodatkowy bezpiecznik na module o wartości 0,5A. Poprawną pracę każdego bloku sygnalizują diody LED. Z napięcia 12 V zasilona jest płyta główna.
Do podziału prądu na wyjściu MZ-01 zastosowano moduł bezpiecznikowy FM-01. Układ posiada cztery niezależne wyjścia. Każde z nich posiada bezpiecznik i sygnalizację obecności napięcia. Uszkodzenie bezpiecznika topikowego obrazowane jest poprzez zgaszenie odpowiedniej diody LED.
Łagodny rozruch transformatora części wysoko-prądowej zapewnia moduł softstart, na którym umieszczono dodatkowy bezpiecznik topikowy. W pierwszych mili sekundach prąd płynie przez rezystory mocy, a następnie załączany jest na 100% za pomocą przekaźnika. Zapobiega to chwilowemu pobieraniu dużej mocy przez transformator, a przez to „wyrzucaniu bezpieczników”.
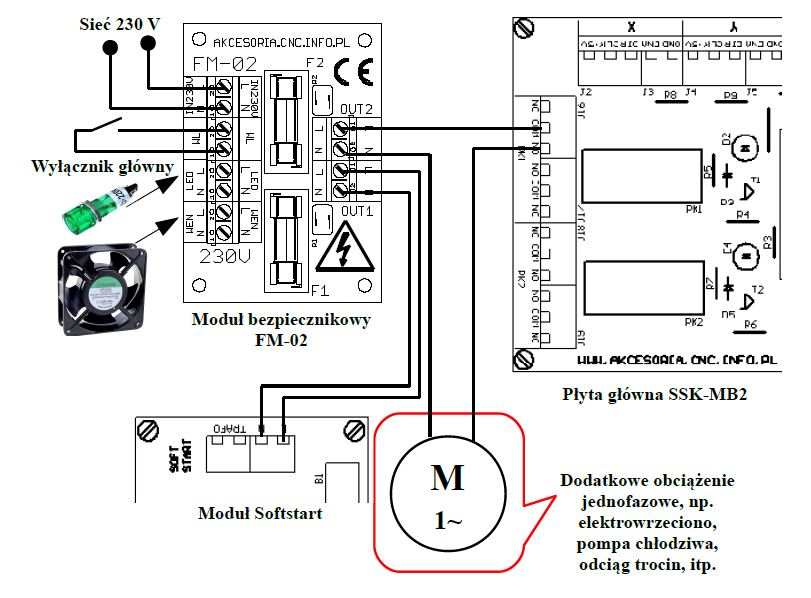
Napięcie 230V, z którego zasilany jest system rozdzielane jest za pomocą modułu bezpiecznikowego FM-02. Eliminuje on dodatkowe złączki i plątaninę przewodów, zapewniając estetyczny wygląd urządzenia. Oba kanały chronią dwa zabezpieczenia- prądowe i przepięciowe. Do urządzenia zainstalowany jest: wyłącznik główny, moduł softstart, wentylator, dioda sygnalizacyjna. Posiada ono dodatkowe wyjście OUT2, do którego możemy podłączyć dodatkowy odbiornik i włączać go za pośrednictwem przekaźników na płycie głównej. Maksymalna moc takiego urządzenia nie może przekroczyć 1,4 kW (6A, 230V).
Uwaga!!! Przy montażu dodatkowego obciążenia należy sporządzić bilans prądów. Trzeba zwrócić uwagę na to, iż maksymalny prąd wyłącznika głównego wynosi 10A
Schemat takiej instalacji przedstawiono poniżej..
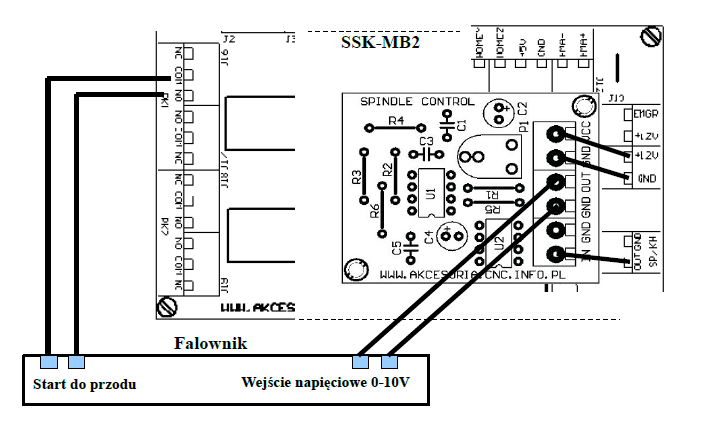
Schemat podłączenia dodatkowego modułu Spindle control, płyty głównej i falownika z wejściem napięciowym do regulacji prędkości obrotowej wrzeciona.
Przed pierwszy uruchomieniem sterownika USN-3D4A należy sprawdzić podłączenia silników, krańcówek, przekaźników. Niestaranne przygotowanie okablowania może spowodować uszkodzenie systemu lub jego niestabilną pracę. Raz jeszcze sprawdzamy ustawienia prądów na poszczególnych stopniach mocy. Podłączamy komputer, uruchamiamy program i włączamy sterownik.
UWAGA!!!
Podczas uruchamiania obrabiarki należy kolejno włączać: komputer, program, sterownik. Program przejmuje kontrolę nad pinami portu LPT. Przy zamykaniu systemu stosujemy kolejność odwrotną. Uchroni to przed nieoczekiwanymi i niebezpiecznymi ruchami maszyny.
Konfiguracja programu Mach3 ze sterownikiem USN-3D4A
Program Mach 3 jest jednym z najpopularniejszych programów sterujących maszynami CNC w naszym kraju, zarówno dla rozwiązań komercyjnych jak i hobbystycznych. Steruje on pracą silników krokowych, lub serwonapędów wysyłając sygnały kroku i kierunku (Step/Dir). Program ten świetnie współpracuje ze wszystkimi sterownikami dostępnymi w naszej ofercie. Przy pomocy programu Mach3 możemy przekształcić komputer w sterownik maszyn CNC. Umożliwia on m. innymi realizację sterowania następujących maszyn: plotery, frezarki, grawerki,tokarki, wypalarki plazmowe, wycinarki styropianu. Dzięki możliwości symulacji sterownika PLC, komunikacji ModBus przy pomocy programu Mach3, komputer PC możemy przekształcić w sterownik praktycznie dowolnej maszyny. Nasi klienci z powodzeniem zrealizowali sterowanie giętarki do rur, automatu spawalniczego, czy urządzenia do malowania proszkowego. Mach3 może sterować dowolnym urządzeniem, które ma maksymalnie 6 osi. Program Mach3 steruje ich praca na podstawie tzw. G-kodów, które możemy przygotować z plików wektorowych na przykład przy pomocy programu LazyCam. Program może sterować dowolnym zestawem sterownika i silnika krokowego. Może też być zastosowane dowolne rozwiązanie mechaniczne przeniesienia napędu ( śruby, listwy, czy paski zębate) – program ma możliwość definiowania parametrów pracy każdej osi z osobna. W oknie programu mamy podgląd na ścieżkę narzędzia, oraz na bieżąco możemy kontrolować parametry obróbki, takie jak prędkość posuwu, czy prędkość obrotową wrzeciona. Program dostępny jest w wersji demonstracyjnej. Jest on w pełni funkcjonalny. Został on jedynie ograniczony do 500 linii G-kodu. Po zakupie licencji ograniczenie programu wynosi 10.000.000 linii G-kodu. Na stronie http://www.akcesoria.cnc.info.pl/mach3.htm dostępne są pliki , które ułatwią przeprowadzenie konfiguracji.
Płyta główna zastosowana w uniwersalnym sterowniku numerycznym USN-3D4A umożliwia sterowanie czterema osiami wraz z krańcówkami bazującymi i limitowymi, obsługę przycisku awaryjnego zatrzymania E-STOP oraz wysterowanie dwóch przekaźników (umieszczonych na płycie). Dodatkowo płyta przygotowana jest do obsługi do modułu Kanthal (sterowanie temperaturą drutu) i Spindle Control (sterowanie prędkością wrzeciona).
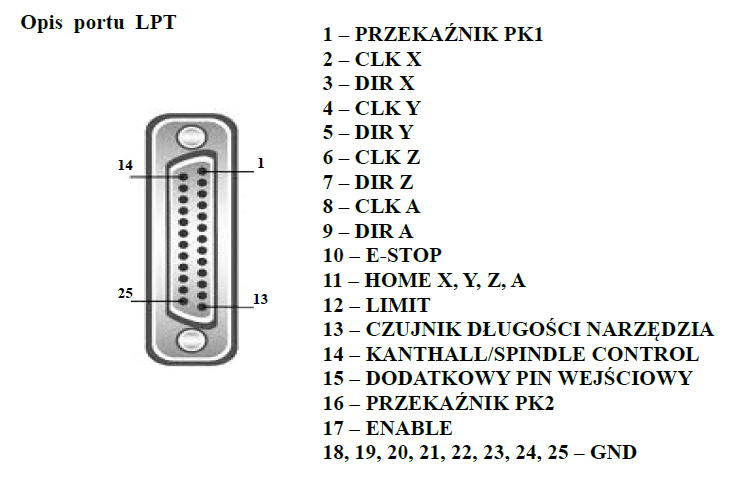
Do podłączania systemu do komputera wykorzystany został port drukarkowy LPT. Wszystkie urządzenia (sterowniki, krańcówki, wrzeciono) podłącza się niezależnie do odpowiednich pinów. Port równoległy ma 25 pinów. Piny 1-9, 14, 16, 17 mogą być wykorzystane jako wyjścia, 10-13, 15 jako wejścia. Piny 18-25 są nie wykorzystywane (masa). Program współpracuje z dowolną kombinacją połączeń tzn. wybór konkretnych pinów wyjściowych bądź wejściowych jest dowolny.
Standardowo w produkowanych przez naszą firmę sterownikach przypisano następującą konfigurację:
Konfigurację programu należy rozpocząć od przypisania zadań do odpowiednich pinów portu LPT. W menu Ustawienia (Config) wybieramy zakładkę Porty i Piny (Ports and Pins). W pierwszym oknie Ustawienia Portów i Wybór Osi (Port Setup And Axis Selection) ustawiamy:
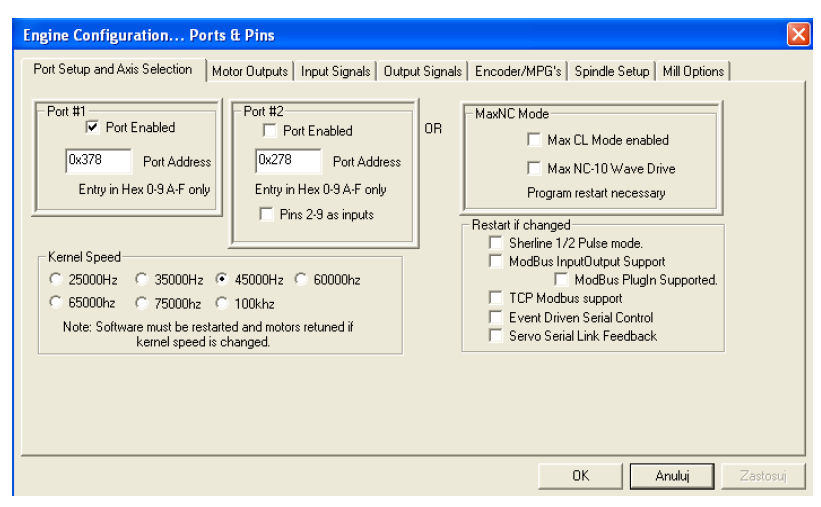
W tej zakładce konfigurujemy program do współpracy ze sterownikami. Możemy tu ustawić między innymi, który port komputera będzie wykorzystany do sterowania maszyną, prędkość pracy programu.
Okienka Port #1 i Port#2 służą do wskazania adresów portów LPT w komputerze. Możemy tu zaznaczyć, których z portów chcemy używać. Jeśli w komputerze jest jeden port to ma najprawdopodobniej adres 0x378, drugi na ogół 0x278 aczkolwiek w przypadku portów na kartach PCI może to być inna wartość. Można to sprawdzić w Menedżerze urządzeń systemu Windows wybierając tam port i sprawdzając pierwszy adres w zakładce "zasoby". (Start/ Panel sterowania/ System/ Sprzęt/ Menedżer urządzeń/ Porty (COM i LPT)/ Port drukarki/Właściwości/Zasoby/Typ zasobu = zakres we/wy. Liczba określająca dolny zakres we/wy będzie adresem naszego portu. Program Mach3 umożliwia pracę z 2 portami LPT, przez co mamy do dyspozycji więcej wejść i wyjść. Ustalenie prędkości pracy programu zależy od prędkości procesora naszego komputera. Jeśli komputer ma procesor 1GHz lub szybszy zalecamy ustawienie 45000Hz. Konfigurację należy zatwierdzić przyciskiem "Zastosuj".
UWAGA !!!
Należy pamiętać, aby przed opuszczeniem okna konfiguracyjnego, kliknąć przycisk zastosuj. W przeciwnym razie utracimy wykonane zmiany.
Następnie przechodzimy do zakładki Wyjścia Silników (Motor Outputs). Ustawienia w tej zakładce pozwalają na określenie ile osi ma wysterować program oraz ,do których pinów zostały podłączone sterowniki silników krokowych. Kierując się listą z opisu portu LPT wprowadzamy ustawienia. Poniżej przedstawione zostały ustawienia dla sterowania czterema osiami X, Y, Z, A oraz wyjścia do modułu Spindle Control.
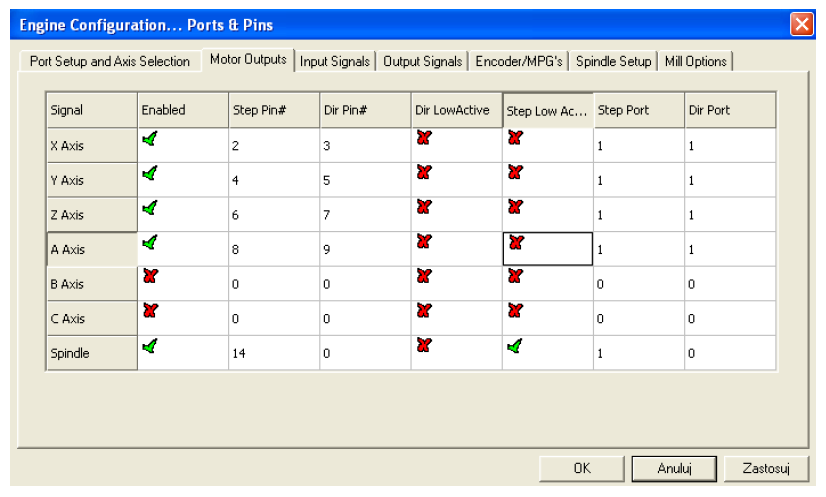
Znaczenie opcji:
Enabled - dana oś ma być używana, jeśli pole zaznaczenie jest na zielono
Step Pin# - numer pinu, na którym będą podawane impulsy kroku dla danej osi
Dir Pin# - numer pinu, na którym będzie określany kierunek ruchu dla danej osi
Dir Low Active - określa czy linia sterująca kierunkiem ma być domyślnie w stanie wysokim czy niskim -zmiana zaznaczenia pozwala odwrócić kierunek ruchu osi
Step Low Active - określa czy linia sterująca krokiem ma być domyślnie w stanie wysokim czy niskim, z reguły
Przypominamy, że zmiany należy zatwierdzić przyciskiem "Zastosuj".
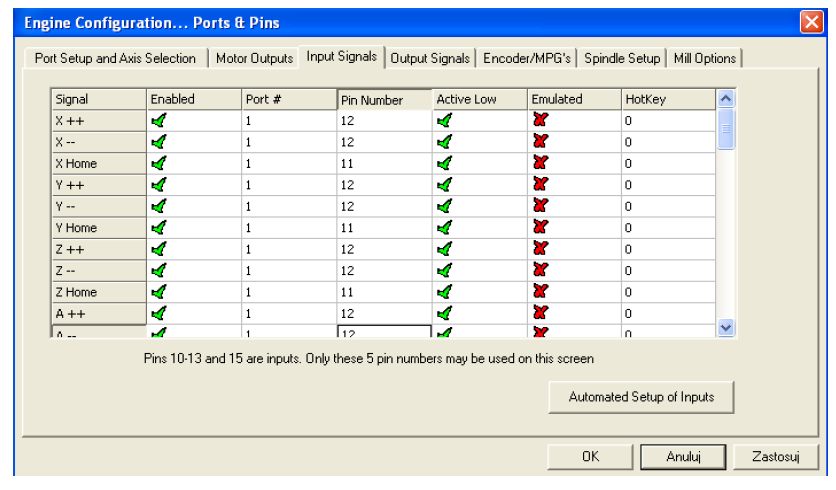
Kolejnym krokiem będzie konfiguracja ustawień w zakładce Sygnały Wejściowe (Input Signals). Ustawienia dotyczą między innymi krańcówek bazujących, bezpieczeństwa oraz przycisku E-STOP. Opcja Active Low służy do wyboru rodzaju krańcówki, która została podłączona do płyty głównej tj. normalnie zwartej lub normalnie rozwartej. Dalej, w tej samej zakładce jest możliwość ustawienia opcji dla przycisku awaryjnego zatrzymania E-STOP. Tutaj podobnie możemy wybrać, jakiego rodzaju wyłącznik został użyty. Jako krańcówek awaryjnych zaleca się stosowanie włączników normalnie zwartych NC. Wyeliminuje to możliwość powstania przerwy w obwodzie. Kiedy np. przewód krańcówki zostanie przerwany E-STOP wyłączy obrabiarkę. Kierując się listą z opisu portu LPT wprowadzamy ustawienia.
Przypominamy, że zmiany należy zatwierdzić przyciskiem "Zastosuj".
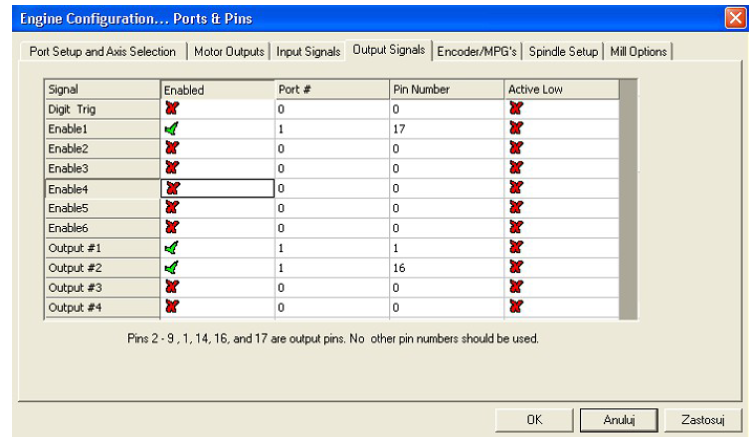
Kolejnym krokiem będzie zmiana ustawień w zakładce Sygnały wyjściowe (Output Signals), w której to mamy możliwość ustawienia wyjścia Włącz (Enable) oraz wyjść ogólnego przeznaczenia (Output#n). Wyjście Enable posłuży nam do załączania sterowników osi. Wyjścia Output#1 oraz Output#2 posłużą nam do wysterowania przekaźników PK1 oraz PK2. Program Mach 3 umożliwia zdefiniowanie więcej wyjść ogólnego przeznaczenia, do których to możemy podłączyć np. kolejne przekaźniki. Wymaga to jednak użycia dodatkowych pinów na płycie głównej.
Ostatnią zakładką, która nam pozostała do skonfigurowania jest zakładka Ustawienia Wrzeciona (Spindle Setup). Możemy tutaj dokonać ustawień dotyczących wrzeciona, chłodziwa i mgły.
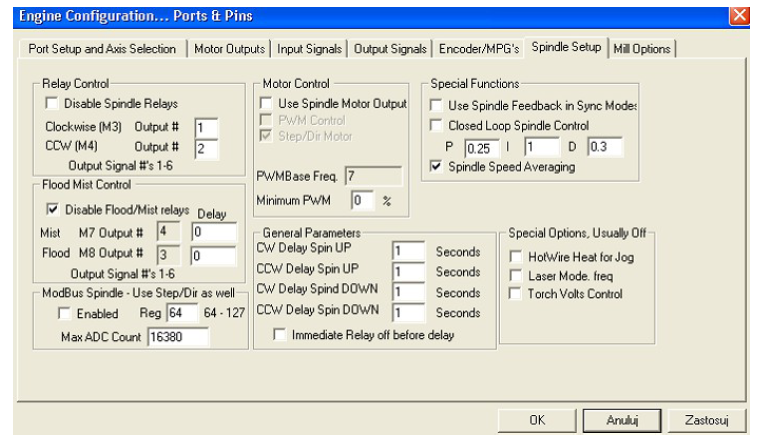
Grupa Przekaźnik (Relay Control) pozwala sterować wł./wył. wrzeciona oraz jego kierunkiem pracy przy użyciu przekaźników dostępnych na płycie. Zaznaczenie Wyłącz obsługę przekaźnika wrzec. (Diable Spindle Relays) spowoduje, że obsługa będzie NIEAKTYWNA. W zakładce Sygnały wyjściowe przypisaliśmy już odpowiednie numery pinów do odpowiednich wyjść. Teraz należy podać numery wyjść, które za pomocą przekaźników będą sterować wrzecionem. Przekaźniki te załączane są komendami M3 oraz M4 w naszym G-kodzie. Grupa Kontrola chłodziwa i mgły (Flood Mist Control) pozwala nam podobnie jak to miało miejsce wyżej, na zdefiniowanie wyjść sterującymi odpowiednimi przekaźnikami.
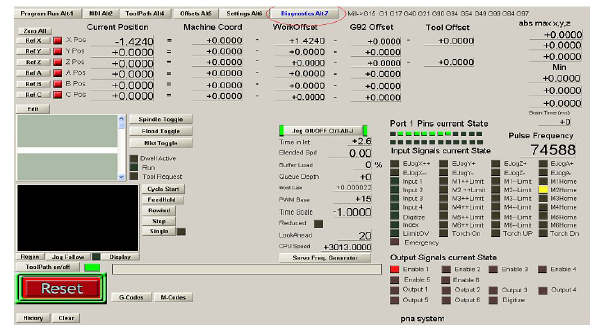
Po konfiguracji pinów proponujemy przetestowanie urządzeń wejściowych – w tym celu na ekranie głównym wciskamy klawisz „Diagnostyka Alt-7”, co powoduje pojawienie się listy urządzeń przyłączonych do komputera. Przy ręcznym załączaniu krańcówek powinny zapalać się żółte lampki przy odpowiednich etykietkach. Jeśli tak się nie dzieje należy sprawdzić konfigurację pinów wejściowych oraz poprawność połączeń elektrycznych.
Aby w pełni się cieszyć z pracującej maszyny należy jeszcze tylko przeprowadzić dostrajanie silników. W tym celu w menu Konfiguracja (Config) wybieramy opcję Dostrajanie silników (Motor Tuning). Pojawi się nam następujące okno:
Przyciski Oś X, Y, Z (X, Y, Z Axis) pozwolą wybrać oś, dla której chcemy dokonać ustawień. Dostępne są tylko osie, które zostały uaktywnione w Wyjścia Silników. Za pomocą strzałek w górę i w dół możemy sterować silnikiem danej osi w obie strony (przed wejściem w zakładkę „dostrajanie silników” program nie może być w trybie RESET, ponieważ silniki nie będą się kręcić) . Prędkość silnika (Velocity) oraz jego przyśpieszenie (Accel) ustawiamy przy użyciu odpowiednich suwaków, lub wpisujemy ręcznie w odpowiednie okienko. Na bieżąco prezentowana jest aktualna charakterystyka prędkości silnika (tzw. rampa).
Bardzo ważnym parametrem jest ilości kroków na 1 jednostkę miary (Steps per). Jednostką są milimetry lub cale, zależnie od ustawień w Konfiguracja/jednostki miary. Wartość tą należy wyznaczyć na podstawie ustawień sterownika i skoku śruby oraz ewentualnie użytych przekładni. Liczbę tą wpisujemy w okienko w lewym dolnym rogu ekranu (Steps per). Przykładowo mamy silnik 200 kroków/obrót, sterownik SSK-B03 z podziałem kroku ustawionym na 1/2, śruba napędowa trapezowa 10x2. Podział kroku umożliwi uzyskanie 400 kroków na obrót silnika. Skok śruby wynosi 2mm na obrót. W takiej konfiguracji ilość kroków potrzebna do przesunięcia osi o 1mm wynosi 200. Wartość tą należy wpisać w polu Steps per. Wpisana błędna wartość spowoduje, że maszyna nie będzie trzymała zadanych wymiarów przy pracy. Przykłady wartości Steps per (ilości kroków potrzebnych do przesunięcia osi o 1mm) dla najpopularniejszych śrub trapezowych zmieszczono w tabeli poniżej (silnik 200 kroków/obrót):
| Skok śruby | Podział | Steps per | Podział | Steps per | Podział | Steps per |
|---|---|---|---|---|---|---|
| 2 | 1/2 | 200 | 1/4 | 400 | 1/8 | 800 |
| 4 | 100 | 200 | 400 | |||
| 8 | 50 | 100 | 200 | |||
| 10 | 40 | 80 | 160 |
Po wpisaniu liczby kroków, dostrajanie silników proponujemy zacząć od niskich prędkości i przyspieszeń stopniowo zwiększając ich wartość. Obie wielkości należy dobrać tak, aby uzyskać wymagane posuwy przy stabilnej pracy maszyny (brak gubienia kroków lub zrywanie się silnika). Wyłączniki krańcowe działają również w trybie dostrajania silników. Jeśli silnik się nie obraca, należy sprawdzić czy wyłącznik bezpieczeństwa nie jest aktywny (migający klawisz „Reset” na ekranie głównym, jeśli miga trzeba go wcisnąć). Jeśli natomiast wyłącznik bezpieczeństwa nie jest aktywny, a silnik nadal się nie obraca należy sprawdzić konfigurację pinów wyjściowych oraz połączenia i konfigurację sterownika. Ustawienie każdej z osi należy przed zmianą osi lub zamknięciem okienka zatwierdzić przyciskiem „Zapisz ustawienia osi”. „Impuls kroku” pozwala na określenie szerokości impulsu dla pojedynczego kroku. Im krótszy tym większa prędkość ruchu da się osiągnąć, ale niektóre sterowniki mogą sobie nie poradzić z niższymi wartościami. Impuls kierunku to minimalny czas potrzebny na zmianę stanu wyjścia sterującego kierunkiem. Zalecamy pozostawienie tych obu wielkości bez zmian.
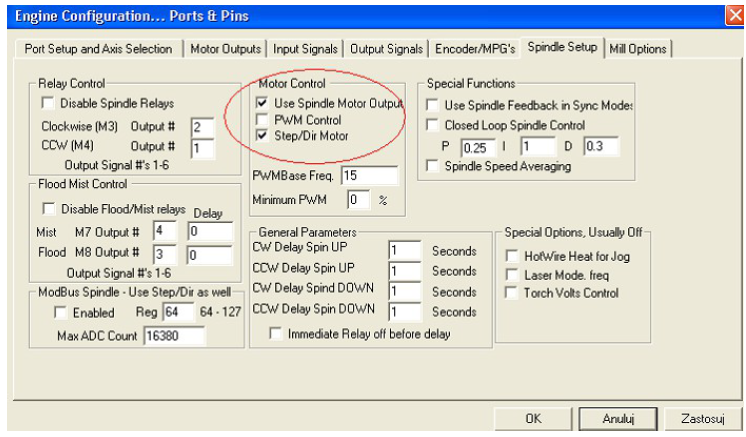
Jak już zostało wspomniane, płyta główna umożliwia podłączenie modułu Spindle Control, który za pośrednictwem falownika umożliwia sterowanie prędkością wrzeciona. Poniżej zostanie przedstawiony sposób konfiguracji programu Mach3 ze wspomnianym urządzeniem. Program umożliwia regulacje obrotów wrzeciona poprzez sterowanie sygnałem kierunku i kroku, tymczasem w większości przypadków regulacją obrotów wrzeciona zajmuje się falownik, który może być sterowany napięciem z zakresu od 0 do 10V. Moduł Spindle Control jest przetwornikiem F/U (częstotliwości na napięcie), którego maksymalne napięcie wyjściowe wynosi 10V. Zamienia on impulsy z programu Mach 3 proporcjonalnie na napięcie, dzięki czemu możliwa jest płynna regulacja obrotów wprost z programu. Moduł został przetestowany z falownikami posiadającymi wejście analogowe służące do regulacji prędkości. W celu poprawnej współpracy modułu z falownikiem należy odpowiednio skonfigurować program Mach3. Pierwszym krokiem jest wybranie w menu Konfiguracja (Config) opcji Porty i Piny ( Ports and pins). Następnie w zakładce Ustawienia Wrzeciona (Spindle Setup) określamy, w jaki sposób sterowane jest wrzeciono. Ustawiamy:
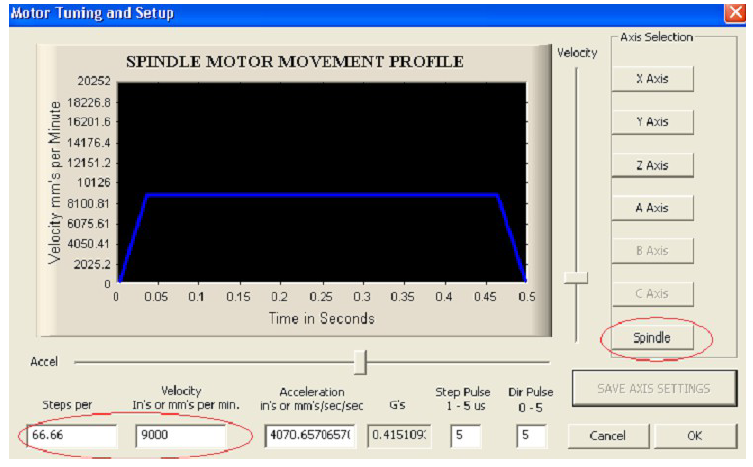
Kolejnym krokiem będzie zmiana ustawień w zakładce Wyjścia Silników (Motor Outputs). Włączamy opcję wrzeciona, oraz wpisujemy numer portu i pinu, z którego będziemy sterować naszym modułem. Zgodnie z opisem portu LPT Spindle Control podłączamy do wyjścia (pinu) numer 14. Zobrazowane było to przy konfiguracji pinów wyjściowych silników. Wrzeciono często napędzane jest przez silnik za pośrednictwem przekładni. Prędkość wrzeciona, w zależności od stopnia użytej przekładni, będzie różniła się od prędkości obrotowej silnika napędzającego. Sterowanie programu Mach 3 odnosi się do prędkości pracy silnika napędzającego wrzeciono. Mając to na uwadze, klikamy teraz w menu Konfiguracja (Config) wybieramy opcję Dostrajanie silników (Motor Tuning). Klikamy na opcję Wrzeciono (Spindle). Wartość wpisana w okienku Prędkość (Velocity) określa nam maksymalną prędkość naszego silnika napędzającego wrzeciono w obrotach na minutę. Dla przykładu przyjmijmy, że maksymalna prędkość naszego wrzeciona wynosi 18.000obr/min. Została użyta przekładnia 1:2, więc prędkość silnika napędzającego wynosi 9.000obr/min. Wartość Step per, określa ile impulsów generuje program na jeden obrót silnika. Aby obliczyć tą wartość, najpierw należy przeliczyć prędkość obrotową wrzeciona na wartość wyrażoną w [obr/s], czyli 9000[obr/min]/60=150[obr/s]. Kolejnym krokiem jest obliczenie wartość Step per. Należy tutaj skorzystać z zależności:

co daje nam wartość 66.66[1/obr] impulsów na obrót silnika. Wyjaśnienia wymaga skąd wzięła się wartość 10.000Hz (Hz=1/s) w powyższym wzorze. Jak już zostało wspomniane moduł Spindle Control jest przetwornikiem F/U, którego maksymalne napięcie wyjściowe wynosi 10V. Stała przetwarzania wynosi: 1000Hz/1V, a więc 1000Hz*10=10000Hz. Gdyby natomiast zostało użyte jedno z elektrowrzecion dostępnych z naszej oferty, np. TMPE4 10/2 3.3kW firmy Elte, które ma 18.000obr/min, wówczas w polu Prędkość wpisalibyśmy 18000, a wartość Step per wyniosłaby 33.33. Warto zauważyć, że powyższe założenia są prawdziwe tylko wtedy, gdy falownik zostanie skonfigurowany tak, że dla napięcia 0V odpowiada prędkość silnika 0obr/min, natomiast przy 10V silnik osiągnie 18.000obr/min. Następnie przy pomocy suwaka ustawiamy Przyśpieszenie (Accel). Przypominamy, że każde zmiany należy zatwierdzić klikając przycisk Zapisz ustawienia osi (Save Axis Settings). Dla założeń, wrzeciona z przekładnią ustawienia będą wyglądały mniej więcej tak:
Jak już zostało wspomniane, sterowanie programu odnosi się do prędkości silnika napędzającego wrzeciono. Nam natomiast zależy na regulacji prędkości wrzeciona. Program Mach 3 ma możliwość zdefiniowania tzw. przełożeń, które to umożliwiają powiązanie prędkości silnika z prędkością wrzeciona. Aby, tego dokonać wybieramy menu Konfiguracja (Config), a następnie Tryby wrzeciona (Spindle Pulleys).
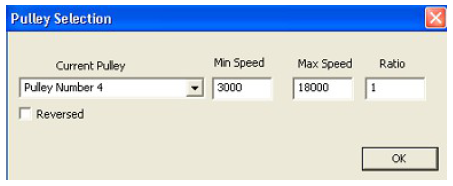
Powinno nam się otworzyć nowe okno. W polu Bieżące przełożenie (Current Pulley) wybieramy jedną z dostępnych pozycji, np. numer 4. Następnie istnieje możliwość zdefiniowania maksymalnej i minimalnej prędkości wrzeciona. Pole Maks. Prędkość (Max Speed) określa maksymalną prędkość wrzeciona, która to odpowiada zdefiniowanej, maksymalnej prędkości silnika napędzającego ustawionej w oknie Dostrajanie Silników. Dla obu naszych przykładów, tj. przykładu z przekładnią (prędkość silnika wynosi 9000obr/min, a użyto przekładni 1:2) oraz elektrowrzeciona TMPE 18000obr/min, prędkość maksymalną ustawiamy na 18.000obr/min. Gdy w G-kodzie wpiszemy polecenie S18000, oznaczać to będzie dla programu, że wrzeciono ma pracować z maksymalną prędkością. Sprowadza się to do tego, że program ma generować maksymalną liczbę pulsów na obrót, u nas było to odpowiednio 66.66, oraz 33.33 impulsy na obrót. Wybranie mniejszych prędkości spowoduje odpowiednie obniżenie prędkości pracy silnika oraz wrzeciona. Natomiast, gdy w g-kodzie będziemy chcieli pracować z prędkością większą od zdefiniowanej, np. 20.000obr/min, wówczas program zgłosi błąd i ustawi możliwą maksymalną prędkość, czyli 18.000obr/min. Błąd ten będzie widoczny w okienku Status (na dole strony). Treść komunikatu będzie następująca: ”To fast for Pulley. Using Max”.
Pole Min. prędkość (Min Speed) określa prędkość po niżej, której program nie pozwoli zwolnić dla wrzeciona. Opcja minimalnej prędkości przydatna jest przy wrzecionach, które chłodzone są wiatrakiem umieszczonym na wirniku. Przy zmniejszaniu prędkości wirowania, wydajność takiego chłodzenia spada. Poniżej pewnej prędkości może być ono niewystarczające, co może prowadzić do uszkodzenia wrzeciona. Zaleca się ustawienie minimalnej prędkości danego wrzeciona zalecanej przez producenta. Ostatnim krokiem jest przetestowanie pracy modułu. Do sterowania wrzecionem służą przyciski umieszczone w prawym dolnym rogu głównego okna programu. Parametr S-ov (Przekr) określa nam 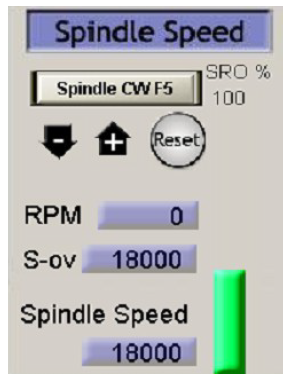 aktualną prędkość obrotów wrzeciona (np. zmieniona parametrem S w Gkodzie), Spindle Speed (Prędkość) określa nam maksymalną prędkość z jaką chcemy, aby pracowało wrzeciono. Nie może ona być większa od prędkości zdefiniowaną w oknie przełożeń. Przycisk Spindle CWF5 (WrzecionoF5) włącza sterowanie wrzeciona.
aktualną prędkość obrotów wrzeciona (np. zmieniona parametrem S w Gkodzie), Spindle Speed (Prędkość) określa nam maksymalną prędkość z jaką chcemy, aby pracowało wrzeciono. Nie może ona być większa od prędkości zdefiniowaną w oknie przełożeń. Przycisk Spindle CWF5 (WrzecionoF5) włącza sterowanie wrzeciona.
Do przetestowania modułu Spindle Control ”na sucho” przydatny będzie woltomierz, który należy podłączyć do wyjścia przetwornika. Kolejność sprawdzania pracy może być następująca: wpisujemy maksymalną prędkość wrzeciona, czyli 18.000obr/min, następnie włączamy wrzeciono przyciskiem Wrzeciono F5. Jeżeli w polu parametru S-ov jest 0 wówczas na wyjściu modułu powinno być 0V (Przy zdefiniowanej prędkości minimalnej, nie uda nam się ustawić prędkości 0). Następnie przyciskamy przycisk Reset (ten pod przyciskiem Wrzeciono F5). To powinno ustawić aktualną prędkość wrzeciona (Parametr S-ov na zdjęciu) na 18000. Wówczas na wyjściu przetwornika powinno panować napięcie około 10V. Jeżeli napięcie to będzie się nieznacznie różnić od 10V, proszę doregulować je za pomocą potencjometru, który znajduje się na płytce modułu. Ustawiając prędkość zadaną (S-ov) na 9000, wówczas na wyjściu modułu powinno pojawić się 5V. Klikając przyciski ”-”, oraz ”+” jesteśmy w stanie regulować prędkość w całym zakresie, tj. od prędkości minimalnej do maksymalnej, zdefiniowanych w oknie przełożeń. Oczywiście można pominąć etap sprawdzania działania modułu z miernikiem i przejść od razu do sprawdzania działania z falownikiem, ale w tym wypadku proponujemy ustawić na falowniku zabezpieczenie w formie ograniczenia prędkości silnika, na wypadek, gdyby się okazało, że jednak źle coś zostało skonfigurowane. Następnie zgodnie z instrukcją danego falownika podłączamy do niego wyjście naszego modułu Spindle Control. Jeżeli wszystko zostało poprawnie podłączone i skonfigurowane, to przy regulacji prędkości wrzeciona w programie powinna być widzialna zmiana prędkości wrzeciona. Do załączania/wyłączania oraz zmiany kierunku obrotów wrzeciona można wykorzystać przekaźniki znajdujące się na płycie głównej.
Porady
W przypadku kiedy sterownik USN-3D4A nie pracuje poprawnie, pierwszym krokiem powinno być sprawdzenie czy problem jest natury elektrycznej czy mechanicznej. Następnym krokiem jest odizolowanie komponentu, który generuje błąd. Może się okazać, że będzie trzeba rozłączyć wszystkie składniki systemu i sprawdzić każdy z osobna czy działa poprawnie. Ważne jest, aby dokumentować każdy krok przy rozwiązywaniu problemu. Być może będzie konieczność skorzystania z tej dokumentacji w późniejszym okresie, a szczegóły w niej zawarte w wielkim stopniu pomogą pracownikom naszego Wsparcia Technicznego rozwiązać zaistniały problem. Wiele błędów w systemie sterowania ruchem może być związanych zakłóceniami elektrycznymi, błędami oprogramowania urządzenia sterującego lub błędami w podłączeniu przewodów. Poniżej przedstawiono tabelę z najpopularniejszymi problemami, z którymi zgłaszają się klienci do naszego Wsparcia Technicznego.
| Objawy | Prawdopodobna przyczyna usterki | Postępowanie |
|---|---|---|
| Silnik nie pracuje | Brak zasilania sterownika | Wizualnie sprawdzamy świecenie się poszczególnych diod LED sygnalizujących obecność napięć na poszczególnych osiach . W przypadku stwierdzenia braku jakiegoś napięcia należy odłączyć zasilanie szafy sterowniczej i sprawdzić działanie poszczególnych bezpieczników. Uszkodzone wymieniamy na wskazane w opisie parametrów USN-3D4A. |
| Źle dobrana rozdzielczość | Wykonujemy korektę ustawień na przełączniku DIP lub w programie Mach3 |
|
| Złe ustawienia prądu | Dokonujemy korektę na przełączniku DIP | |
| Aktywny błąd sterownika | Sprawdzamy wartość napięcia zasilania stopni końcowych. Przy wyłączonym zasilaniu szafy sprawdzamy podłączenia z silnikami (prawdopodobne zwarcie na wyjściu sterownika). Włączone zabezpieczenie termiczne. |
|
| Brak sygnału zezwolenia | Sprawdzamy konfigurację pinu wyjściowego Enable, możliwe, że trzeba będzie zmienić jego stan na przeciwny (Acive Low). |
|
| Silnik kręci się w złym kierunku | Fazy silnika mogą być odwrotnie podłączone | Przy wyłączonym zasilaniu szafy zamieniamy wyprowadzenia jednej fazy silnika lub zmieniamy kierunek w programie sterującym. |
| Błąd sterownika | Złe ustawienia prądu | Dokonujemy korektę na przełączniku DIP |
| Skrócone zwoje faz silnika | Możliwe zwarcie na wyjściu sterownika, możliwe uszkodzenie silnika | |
| Przeciążenie na zasilaniu lub wyjściu sterownika | Sprawdzamy wartość napięcia zasilania stopni końcowych. Przy wyłączonym zasilaniu szafy sprawdzamy podłączenia z silnikami (prawdopodobne zwarcie na wyjściu sterownika). | |
| Przegrzanie sterownika | Sprawdzamy wartość zadaną prądu (może być zbyt duża). Sprawdzamy ustawienia funkcji redukcji prądu. Sprawdzamy drożność filtrów wentylacyjnych w szafie sterowniczej i poprawność działania wentylatora. | |
| Nieregularny ruch silnika | Kable silnika nieekranowane | Do podłączeń silników należy stosować kable ekranowane, ekran należy uziemić. Sprawdzamy poprawność uziemienia. |
| Kable sterujące nieekranowane | Do połączeń sterowników z płytą główną należy stosować kable ekranowane, ekran należy uziemić. Sprawdzamy poprawność uziemienia. | |
| Kable sterujące za blisko kabli silników | Sprawdzamy odległość między kablami sterującymi a zasilającymi silniki. | |
| Złe uziemienie w systemie Przerwane uzwojenie silnika |
Sprawdzamy poprawność uziemienia. Przy wyłączonym zasilaniu szafy sprawdzamy poprawność połączeń silnik ze sterownikiem. Sprawdzamy rezystancję uzwojeń. W razie potrzeby wymieniamy silnik na nowy. |
|
| Złe podłączenie faz silnika | Przy wyłączonym zasilaniu szafy sprawdzamy podłączenia silnika. Jeżeli zaobserwujemy nieprawidłowość, korygujemy. | |
| Kabel sterujący LPT uszkodzony | Przy wyłączonym zasilaniu szafy sprawdzamy podłączenia szafy z komputerem. Jeżeli zaobserwujemy nieprawidłowość, korygujemy. W razie potrzeby wymieniamy kabel sterujący LPT na nowy. | |
| Opóźnienia podczas przyśpieszania silnika | Złe ustawienia prądu | Dokonujemy korektę na przełączniku DIP |
| Za słaby silnik do aplikacji | Wymieniamy silnik na inny, mocniejszy. | |
| Zbyt wysokie ustawienia przyśpieszania | Wykonujemy korektę ustawień na przełączniku DIP. Korygujemy nastawy wykonane w programie Mach3 podczas dostrajania siników. | |
| Zbyt niskie napięcie zasilania | Sprawdzamy wartość napięcia zasilania stopni końcowych. | |
| Nadmierne grzanie się silnika i sterownika | Zbyt słabe odprowadzenie ciepła | Sprawdzamy drożność filtrów wentylacyjnych w szafie sterowniczej i poprawność działania wentylatora. |
| Nieużywana redukcja prądu | Sprawdzamy ustawienia funkcji redukcji prądu. Wykonujemy korektę na przełączniku DIP |
|
| Zbyt wysokie ustawienie prądu | Wykonujemy korektę na przełączniku DIP | |
| Krańcówka nie działa | Ustawienia programowe | Sprawdzamy konfigurację programu dla danej krańcówki. Konfiguracja, porty i piny sygnały wejściowe. |
| Przerwa w obwodzie | Sprawdzamy poprawność połączeń. |
Wymagania
Personel zajmujący się instalacją musi posiadać elementarną wiedzę w zakresie obchodzenia się z urządzeniami elektrycznymi. Urządzenie powinno być zamontowane w pomieszczeniach zamkniętych zgodnie z I klasą środowiskową, o normalnej wilgotności powietrza (RH=75% maks. bez kondensacji) i temperaturze z zakresu +5°C do +40°C.