


Moduł Kanthall przeznaczony jest do regulacji stopnia nagrzania drutu oporowego w różnego rodzaju ploterach termicznych. Przystosowany jest do współpracy z płytą główną SSK-MB1 i SSK-MB2. Sterowanie odbywa się przy wykorzystaniu sygnału PWM (modulacja szerokości impulsu), dlatego też moduł będzie poprawnie współpracował z programami, sterownikami z wyjściem PWM.
Do wykonania połączeń z urządzeniami zewnętrznymi wykorzystano złącza typu ARK 1,5 mm² o maksymalnym napięciu 250V i prądzie przewodzenia 16A. Komponenty, z których wykonany został moduł Kanthall spełniają dyrektywę RoHS Unii Europejskiej dotyczącą ochrony środowiska naturalnego. Urządzenie wykonuje się w technologii bezołowiowej. Spoiwo użyte do montażu urządzenia zawiera 99% cyny i 1% miedzi.
Moduł Kanthall przeznaczony jest do regulacji stopnia nagrzania drutu oporowego w różnego rodzaju ploterach termicznych. Przystosowany jest do współpracy z płytą główną SSK-MB1 i SSK-MB2. Sterowanie odbywa się przy wykorzystaniu sygnału PWM (modulacja szerokości impulsu), dlatego też moduł będzie poprawnie współpracował z programami, sterownikami z wyjściem PWM.
Do wykonania połączeń z urządzeniami zewnętrznymi wykorzystano złącza typu ARK 1,5 mm² o maksymalnym napięciu 250V i prądzie przewodzenia 16A. Komponenty, z których wykonany został moduł Kanthall spełniają dyrektywę RoHS Unii Europejskiej (Restriction of use of certain Hazardous Substances) dotyczącą ochrony środowiska naturalnego. Urządzenie wykonuje się w technologii bezołowiowej. Spoiwo użyte do montażu urządzenia zawiera 99% cyny i 1% miedzi.
Zalety modułu Kanthall:
- niski koszt,
- małe wymiary,
- zasilanie 12VDC,
- estetyczne wykonanie,
- łatwy montaż,
- korzystny stosunek cena/jakość/możliwości.
Dane techniczne KANTHAL - regulatora temperatury drutu do Mach3
Parametry elektryczne
| Napięcie zasilania modułu | 12 VDC |
| Maksymalne napięcia zasilania drutu | 100 VDC |
| Maksymalny prąd zasilania drutu | 10 A |
| Maksymalna moc układu (napięcie zasilania drutu x prąd sterowny) | < 200 W |
Parametry eksploatacyjne
| Środowisko | Miejsce | Unikać kurzu, oleju i gazów powodujących korozję | |
| Temperatura | otoczenia | 0°C - 50°C | |
| składowania | 0°C - 50°C | ||
| Wilgotność | 30% - 75% RH (bez kondensacji) | ||
Parametry mechaniczne
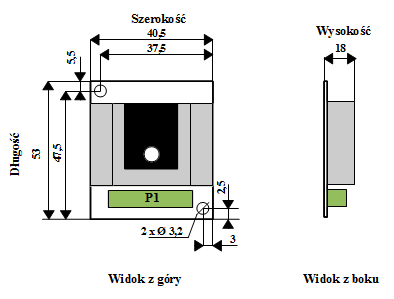
| Wymiary [mm] | Długość | 53 | |
| Szerokość | 40,5 | ||
| Wysokość | 18 | (wysokość zależna jest od zastosowanego radiatora) | |
| Waga [kg] | ~ 0,036 | ||
Wymiary:
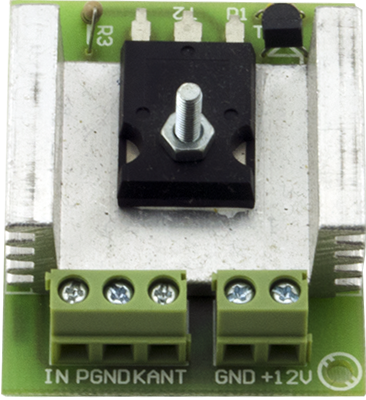
Budowa (opis złącz) modułu Kanthall regulatora temperatury drutu do Mach3
Piny złącza P1

| PIN | Funkcja |
|---|---|
| +12V | Wejście zasilania modułu Kanthall +12VDC. |
| GND | Masa zasilania modułu. |
| KANT | Wyjście modułu. Podłączamy do jednego z końców drutu oporowego. Drugi koniec do dodatniego wyjścia zasilacza drutu. |
| PGND | Masa zasilania drutu. |
| IN | Wejście modułu. Podłączamy sygnał sterujący z programu wykonawczego (PWM) |
Eksploatacja modułu Kanthall regulatora temperatury drutu do Mach3
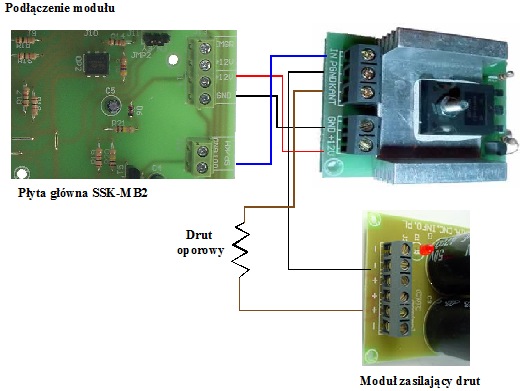
Moduł Kanthall możemy podłączyć do obu, produkowanych przez naszą firmę, płyt głównych tj. SSK-MB1 i SSK-MB2. W przypadku drugiej z nich, w celu podłączenia przetwornika wykorzystujemy złącze J15 ( SP/KH „OUT”- łączymy z wejściem „IN” modułu, podobnie czynimy z masami „GND” obu płytek). Do zasilenia Kanthall'a możemy użyć złącza J14 (+12V) znajdującego się na SSK-MB2. W przypadku płyty głównej SSK-MB1 wykorzystujemy wyjście/wejście AUX. Pin 1 to wyście sygnału sterującego SP/KH (14 pin gniazda LPT). Wyjście „KANT” modułu łączymy z jednym z końców drutu oporowego. Drugi koniec podłączamy do plusa zasilania drutu. Wejście PGND to masa zasilania drutu i modułu.
Konfiguracja Programu Mach 3 do współpracy z modułem Kanthall
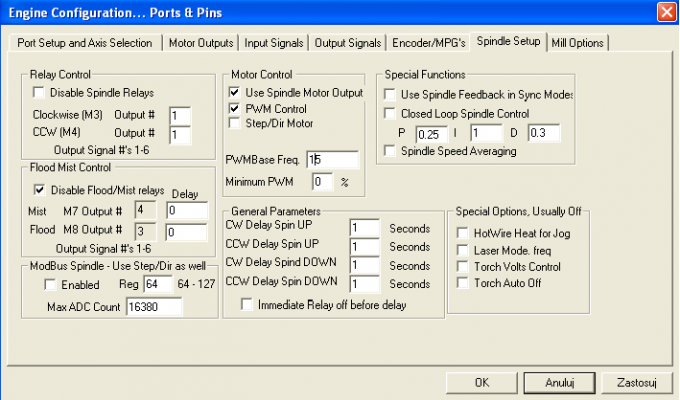
Aby skonfigurować program Mach 3 do współpracy z modułem sterowania temperaturą drutu oporowego kierujemy się następującą logiką. W programie Mach3 w menu Konfiguracja (Config) wybieramy opcję Porty Piny ( Ports and Pins). W zakładce Ustawienia wrzeciona (Spindle Setup) ustawiamy w jaki sposób program ma sterować modułem. W naszym przypadku będzie to PWM.
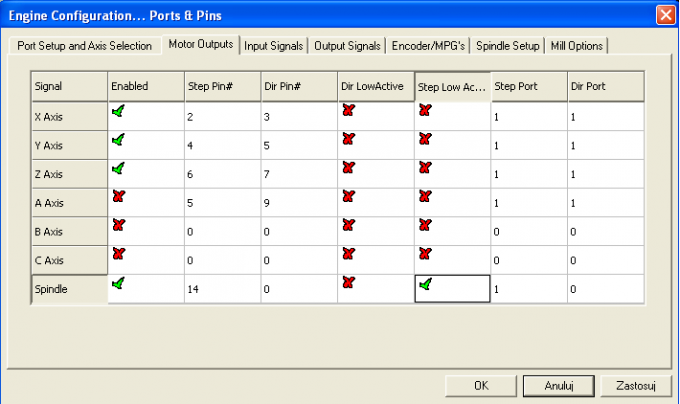
Kolejnym krokiem będzie zmiana ustawień w zakładce Wyjścia Silników (Motor Outputs). Włączamy opcję wrzeciona, wpisujemy numer portu i pinu, z którego będziemy sterować naszym modułem. W naszym przypadku będzie to pin numer 14 (zgodnie z nadrukiem znajdującym się na płytce SSK-MB2). Opcja Step LowActive umożliwia nam odwrócenie logiki działania modułu Kanthal.
Program umożliwia zdefiniowanie tzw. ”przełożeń”. Aby, tego dokonać wybieramy menu Konfiguracja (Config), a następnie Tryby Wrzeciona (Spindle Pulleys).
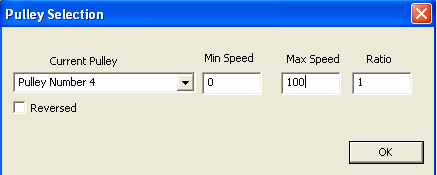
Proponujemy w polu maksymalna prędkość wpisać 100, a minimalna 0. Można to wtedy potraktować jako zasilanie wyrażone w procentach, tzn. dla 100 będzie oznaczało to, że drut jest zasilany na stałe (przez co osiągnie maksymalną temperaturę), natomiast dla 0 drut będzie zimny (brak zasilania). Opcja Step LowActive w menu Wyjścia Silników. Zmiana tej opcji umożliwia odwrócenie logiki pracy modułu, tzn. dla 100 drut będzie zimny, natomiast dla 0 drut będzie zasilany na stałe.
Do korekcji temperatury używamy przycisków znajdujących się w prawym dolnym rogu głównego okna programu. Sterowanie wygląda następująco:
- na początku należy wpisać wartość parametru (dla przykładu będzie to 100). Parametr ten określa nam, jak bardzo ma się nagrzać drut, przy czym maksymalny poziom gorąca został określony w oknie przełożeń,
- włączenie grzania drutu, klikamy przycisk Spindle (lub F5), Parametr S-ov określa nam aktualny poziom gorąca drutu,
- klikając przyciski ”-” oraz ”+” możemy regulować stopień nagrzania drutu.

Instrukcja montażowa
Wykaz elementów:
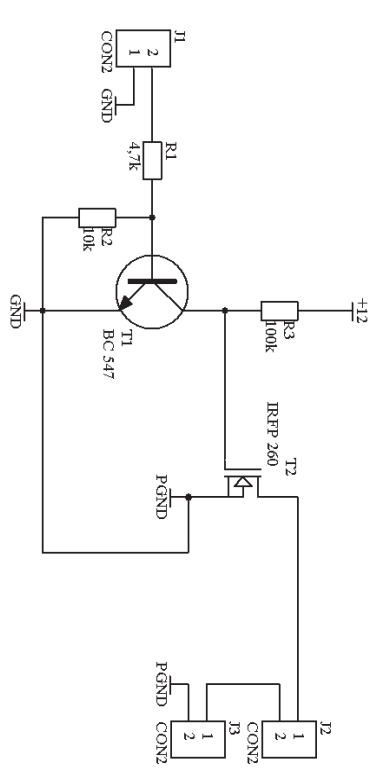
Rezystory:
R1 – 4k7 Ω,
R2 - 10 kΩ,
R3 – 100 kΩ,
Półprzewodniki:
T1 – BC 547,
T2 – IRFP 260N,
Złącza:
J1...J3 - złącza ARK.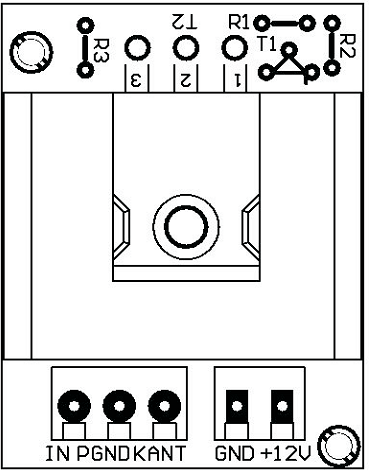
Wskazówki dotyczące montażu:
Montaż proponujemy rozpocząć od wlutowania najmniejszych elementów, czyli zwór (oznaczonych liniami prostymi), następnie przechodzimy do coraz większych rezystory, diody, tranzystory itd.
Schemat ideowy modułu Kanthall
Porady
W przypadku kiedy moduł Kanthall nie pracuje poprawnie, pierwszym krokiem powinno być sprawdzenie czy problem jest natury elektrycznej czy mechanicznej (brak połączeń). Ważne jest, aby dokumentować każdy krok przy rozwiązywaniu problemu. Być może będzie konieczność skorzystania z tej dokumentacji w późniejszym okresie, a szczegóły w niej zawarte w wielkim stopniu pomogą pracownikom naszego Wsparcia Technicznego rozwiązać zaistniały problem. Wiele błędów w systemie sterowania ruchem może być związanych zakłóceniami elektrycznymi, błędami oprogramowania urządzenia sterującego lub błędami w podłączeniu przewodów.