



Serwonapędy CNCDrive

Prezentowane poniżej serwonapędy serii DG3S oraz DG4S umożliwiają sterowanie prędkością oraz pozycją silników szczotkowych prądu stałego. Sterowanie odbywa się podobnie jak w przypadku silników krokowych sygnałem kroku i kierunku (STEP/DIR). Wszystkie wejścia sterujące są optoizolowane, co umożliwia proste dopasowanie sterowników do różnych napięć sygnałów sterujących. Dzięki zastosowaniu sprzężenia zwrotnego w postaci enkodera, mamy ciągłą kontrolę nad pozycją silnika oraz ewentualnym błędem pozycjonowania. Sterowniki umożliwiają podłączenie silników o maksymalnym prądzie 35A oraz napięciu pracy nie przekraczającym 160VDC. W ofercie dostępny jest również Moduł hamujący, który należy stosować w aplikacjach, gdzie napięcie zasilania sterownika przekracza 80VDC, a od serwosilnika wymagane są częste zmiany prędkości oraz nawroty.
Dzięki prostej aplikacji SerwoConfig instalowanej pod systemem Windows jesteśmy w stanie w szybki i prosty sposób przeprowdzić strojenie regulatora PID oraz diagnostykę serwonapędu. W celu podłączenia sterownika do komputera potrzebna jest Płytka do programowania sterowników DG3S.
Silniki dostępne są z następującymi mocami: 45W, 150W oraz 400W. Silniki te charakteryzują się niską bezwładnością, dzięki czemu doskonale nadają się do zastosowań w systemach pozycjonowania. Znajdują zastosowanie w styroploterach, małych oraz średnich grawerkach, ploterach tnących, czy frezarkach oraz wszędzie tam gdzie od napędu wymagany jest duży moment obrotowy przy wysokiej prędkości obrotowej. Silniki dostępne są w dwóch wersjach: z zamontowanym enkoderem, lub bez enkodera (enkoder jest wymagany w celu dostarczenia informacji o pozycji oraz prędkości obrotowej silnika dla sterownika).

Sterowniki serii DG2S przeznaczone są do sterowania pracą szczotkowych silników prądu stałego (komutatorowego, silnika prądu stałego, tzw. Brush DC permanent magnet motor). Dostępne są sterowniki: DG2S 8020 ( maksymalne napięcie pracy 80V, prąd do 20A), Do w/w sterowników wymagana jest płytka programatora ( w celu zaprogramowania regulatora PID), oraz opcjonalnie moduł hamujący. W poszczególnych instrukcjach wyjaśniono przeznaczenie poszczególnych złącz, znaczenie diod LED, podano parametry elektryczne i mechaniczne. Aby zapewnić sprzężenie zwrotne, potrzebny jest enkoder inkrementalny z kanałami A i B. Sygnały sterujące są to sygnału kroku i kierunku (Step/Dir). Sterowniki serii DG2S mogą współpracować z dowolnym oprogramowaniem realizującym tego typu sterowanie, np. popularny program Mach3.

Sterowniki serii DG2S przeznaczone są do sterowania pracą szczotkowych silników prądu stałego (komutatorowego, silnika prądu stałego, tzw. Brush DC permanent magnet motor). Do w/w sterowników wymagana jest płytka programatora ( w celu zaprogramowania regulatora PID), oraz opcjonalnie moduł hamujący. W poszczególnych instrukcjach wyjaśniono przeznaczenie poszczególnych złącz, znaczenie diod LED, podano parametry elektryczne i mechaniczne. Aby zapewnić sprzężenie zwrotne, potrzebny jest enkoder inkrementalny z kanałami A i B. Sygnały sterujące są to sygnału kroku i kierunku (Step/Dir). Sterowniki serii DG2S mogą współpracować z dowolnym oprogramowaniem realizującym tego typu sterowanie, np. popularny program Mach3.
Podczas hamowania silnik DC zaczyna pracować jako generator, tym samym zwracając energię do sterownika. Może to spowodować zwiększenie napięcia zasilania, co w pewnych sytuacjach może być niebezpieczne, zarówno dla silnika, sterownika oraz źródła zasilania. Przy napięciu zasilania większym od 80VDC zaleca się stosowanie modułu rezystora hamującego, który wytraci zwracaną energię w postaci ciepła, w ten sposób utrzymując wartość napięcia zasilania na żądanym poziomie. W swojej ofercie mamy układy rezystora hamującego, który współpracuje z sterownikami serii DG3S oraz DG4S. Więcej informacji możemy znaleźć w instrukcji układu rezystora hamującego.

Przy pomocy 4-pinowego złącza USB-B sterownika DG3S oraz DG4S możemy przeprowadzić strojenie oraz dokonać diagnostyki sterownika. Do złącza należy podłączyć płytkę programatora (sprzedawana oddzielnie), która to umożliwi nam podłączenie sterownika do portu USB komputera PC. Więcej informacji można znaleźć w instrukcji obsługi programatora. Połączenie programatora z komputerem możemy dokonać przy pomocy standardowego kabla USB A-B ( który nie znajduje się w zestawie ).

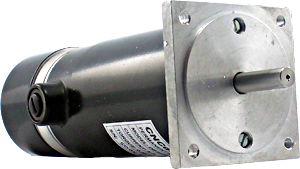
Szczotkowy silnik prądu stałego z zamontowanym enkoderem.
- Moc: 45 W
- Napięcie znamionowe: 24 VDC
- Prąd ciągły: 1.9 A
- Max obroty: 3000 obr/min
- Moment obrotowy: 0.1 Nm
- Waga: 0.8 kg
Silnik posiada wyprowadzoną po obu stronach oś wału, w cel umożliwienia montażu enkodera.
Enkoder: zamontowano enkoder magnetyczny typu AMT103V o regulowanej rozdzielczości, maksymalnie do 2048 imp/obr.
Szczotkowy silnik prądu stałego z zamontowanym enkoderem.
- Moc: 150 W
- Napięcie znamionowe: 30 VDC
- Prąd (ciągły/szczytowy): 5/20 A
- Max obroty: 3000 obr/min
- Moment obrotowy: 0.38 Nm
- Waga: 2 kg
Silnik posiada wyprowadzoną po obu stronach oś wału, w cel umożliwienia montażu enkodera.
Enkoder: zamontowano enkoder magnetyczny typu AMT103V o regulowanej rozdzielczości, maksymalnie do 2048 imp/ob
Szczotkowy silnik prądu stałego.
- Moc: 45 W
- Napięcie znamionowe: 24 VDC
- Prąd ciągły: 1.9 A
- Max obroty: 3000 obr/min
- Moment obrotowy: 0.1 Nm
- Waga: 0.8 kg
Szczotkowy silnik prądu stałego.
- Moc: 150 W
- Napięcie znamionowe: 30 VDC
- Prąd (ciągły/szczytowy): 5/20 A
- Max obroty: 3000 obr/min
- Moment obrotowy: 0.38 Nm
- Waga: 2 kg

Szczotkowy silnik prądu stałego z zamontowanym enkoderem.
- Moc: 400 W
- Napięcie znamionowe: 45 VDC
- Prąd (ciągły): 9 A
- Max obroty: 3000 obr/min
- Moment obrotowy: 0.96 Nm
- Waga: 5 kg
Silnik posiada wyprowadzoną po obu stronach oś wału, w cel umożliwienia montażu enkodera.
Enkoder: zamontowano enkoder magnetyczny typu AMT103V o regulowanej rozdzielczości, maksymalnie do 2048 imp/obr.